3D object detection is crucial for autonomous vehicles. It utilizes point cloud data generated by LiDAR to help autonomous vehicles identify surrounding objects. This technology is essential for the safety and efficiency of autonomous driving.
Recently, a research team from the Hefei Institutes of Physical Science of the Chinese Academy of Sciences proposed a point cloud 3D object detection method based on attention mechanism and data augmentation.
"It can help self-driving cars better detect small objects," said Prof. WANG Zhiling, who led the team.
The achievement was published on IEEE Transactions on Intelligent Transportation Systems.
Traditional object detection methods usually convert sparse and unordered point cloud data into pseudo-images to extract ordered information. However, this conversion often loses critical features, leading to a decline in detection accuracy, especially in detecting smaller objects.
In this study, researchers introduced a new approach, SCNet3D, to 3D object detection. It focuses on improving feature enhancement, preserving information, and detecting small objects by addressing both feature and data.
With this method, they used a Feature Enhancement Module, which applies an attention mechanism to collect important features across three dimensions, gradually improving the 3D features from local to global.
Also, the new approach adopted STMod-Convolution Network (SCNet), which has two channels for feature extraction. One channel works on basic features, while the other handles more complex, advanced features by combining information from bird-eye view pseudo-images.
The research also proposed a Shape and Distance Aware Data Augmentation method, which adds useful samples to the point cloud during training.
Tests proved that this method has advantages in detecting small objects, even in challenging environments with lots of interference. This makes it a promising tool for autonomous driving.
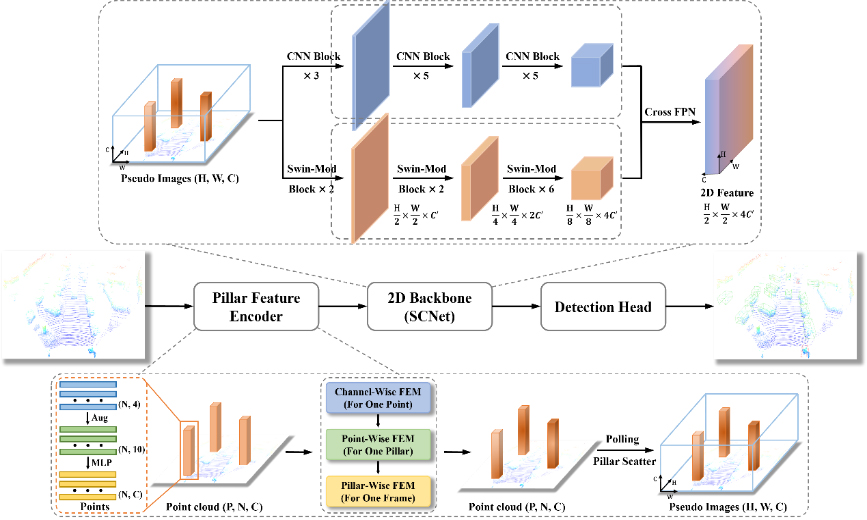
Overview of SCNet3D (Image by WANG Zhiling)





