Researchers from the University of Southampton have worked with the National Oceanography Centre (NOC) using high resolution camera-equipped autonomous underwater vehicles, to better understand end-of-life oil fields in the North Sea that could pave a more sustainable way for future marine surveys.
The mission, part of NERC INSITE's Autonomous Techniques for infraStructure Ecological Assessment (AT-SEA) project, involved the deployment of a robot submarine, Autosub Long Range (ALR), or 'Boaty McBoatface', to collect vital data in areas surrounding multiple decommissioned oil and gas structures off the shore of Shetland in Scotland.
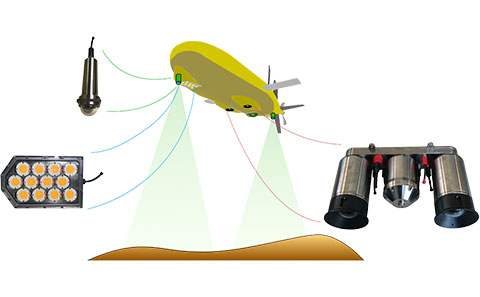
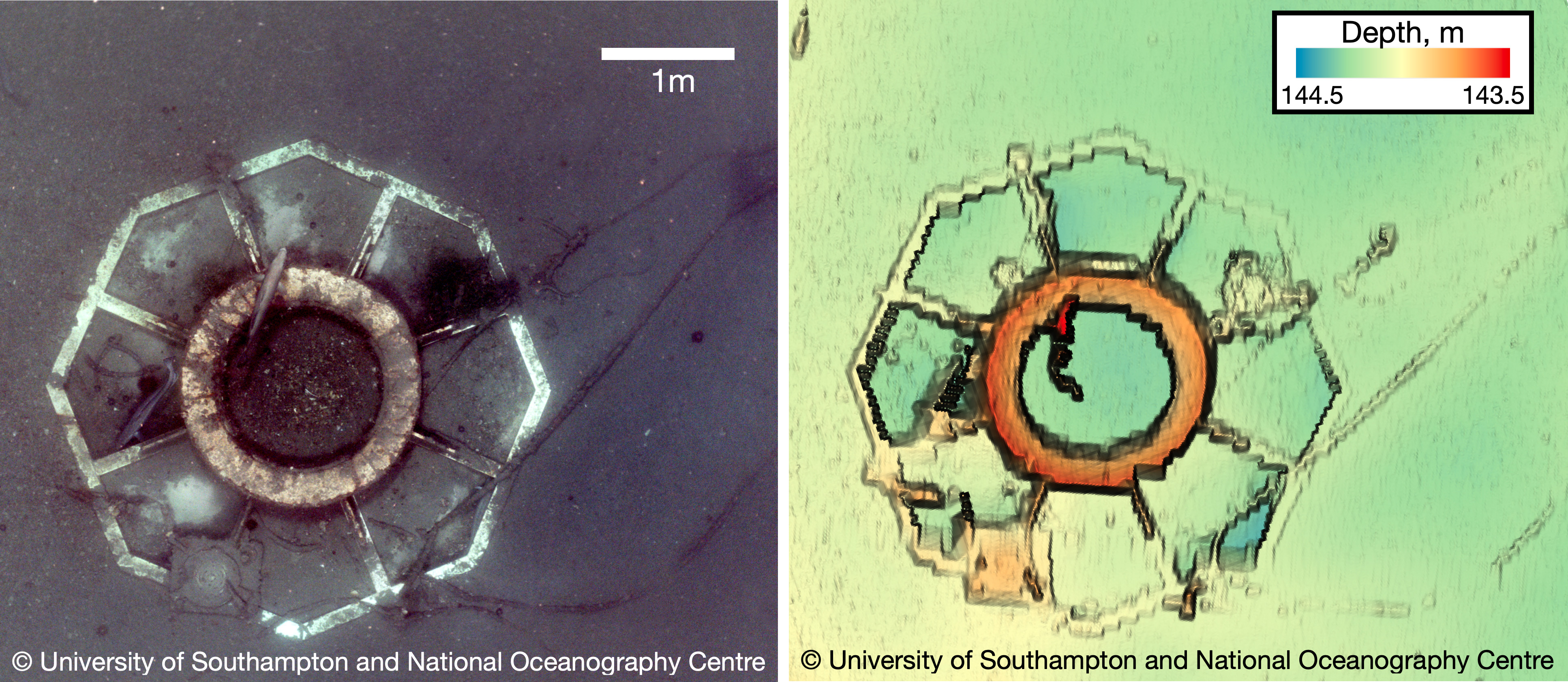
The ALR captured high-quality colour images using BioCam, a novel 3D visual mapping system that was developed by researchers in Maritime Engineering.
Blair Thornton, Professor of Marine Autonomy said: "Our focus was on how to monitor these types of infrastructures in more effective, environmentally friendly and scalable ways."
"We were able to gather high quality data that tells us previously unknown things about the marine environment using a very novel approach."
The AT-SEA mission
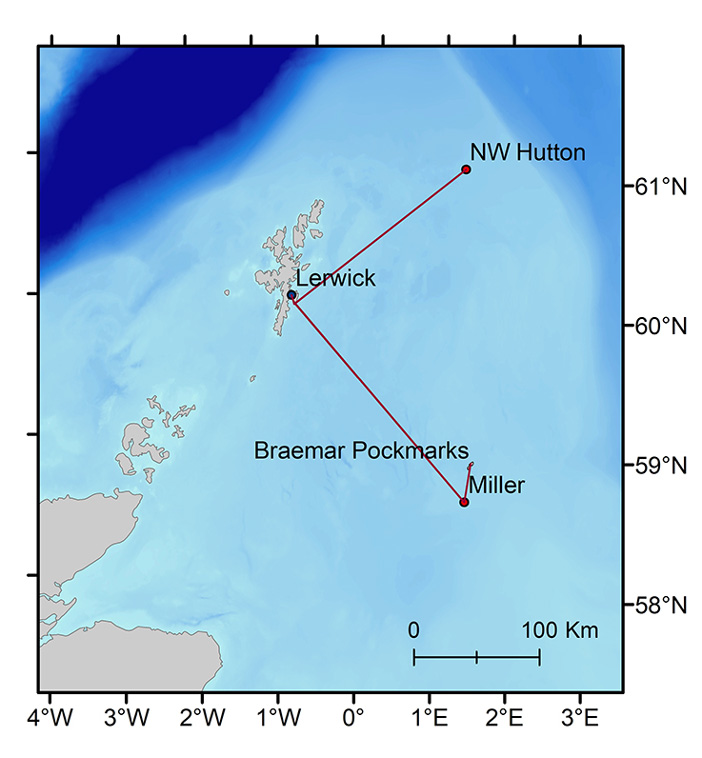
During September and October 2022, the ALR, Boaty McBoatface, performed two missions and travelled 1013 km over 21 days to the decommissioned offshore oil and gas infrastructures in NW Hutton and Miller, and surveyed the Braemar Pockmarks Marine Protected Area.
Since 2021, the project has been looking into offering a low carbon solution to seafloor monitoring. In UK waters alone, there are nearly 500 oil and gas structures in the seas that are approaching the end of their lives. To ensure that no harmful effects will occur to the marine environment, decommissioning operations need to be supported by an environmental assessment and subsequent monitoring.
Normally, this monitoring would be carried out using large survey vessels, which use vastly more fuel than vehicles like Boaty McBoatface. Autonomous underwater vehicles would normally be launched and recovered from ship, like these out near the survey sites.
But in the AT-SEA mission, the ALR was launched and recovered from shore in Shetland. It was operated for 21 days without using a ship to support the operations, and tracked via satellite.
Adrian Bodenmann, a researcher on the project, said: "Even though we were many 1000 km away in our Boldrewood offices in Southampton, we could keep track of the quality of data being gathered using algorithms embedded onboard BioCam, and also know of any risks or hazards to the vehicle mission.
"We worked together with the team at NOC and updated mission parameters when needed while the robot was still at the sites.
"It was this rapid remote awareness of the data that was the key to making the surveys a success."
For the two missions, ALR, which was powered using rechargeable batteries, used the energy equivalent of two litres of fuel. An equivalent mission using ships for autonomous robot deployment and recovery would have used several tens to a hundred thousand litres of fuel. The massive savings achieved by ship-free operations were only possible due to this novel use of technology.
Project lead for AT-SEA, Dr Daniel Jones from NOC, explained: "Through the success of the AT-SEA mission, we have demonstrated how this leading robotic technology from NOC could be used worldwide to support crucial ocean monitoring, whilst drastically reducing carbon emissions."
"Autonomous submarines offer many advantages over current approaches; improving the quality and quantity of environmental information while cutting the cost and environmental impact for a survey ship and its crew."

BioCam system – 'High quality data using a very novel approach'
Developed as part of NERC Oceanids, BioCam is a system of multiple cameras, lasers and strobes, that can gather high resolution 3D visual reconstructions of seafloor terrains over extremely large areas at depths of up to 4000m.
During AT-SEA, the BioCam system was mounted on the ALR and was used to survey the seafloor at depths of more than 100 metres at remote sites several 100km offshore, with the ALR operating alone for several weeks.
"Normally, we would have no idea what the robot had seen until after we recover it," said Adrian.
"For short deployments from ships, this isn't a problem but for shore-launched missions like in AT-SEA, we would have no way of knowing whether the data being gathered was any good for the entire duration."
Challenge accepted
Technology demonstrations for robots like Boaty McBoatface are often conducted at lower-risk sites to show new concepts and ideas.
"This was not the case in AT-SEA," Professor Thornton said.
"Sites like NW Hutton and Miller are extremely challenging environments for robots to operate in. They weren't designed and located to make things easy for robotic submersibles. They were designed and located to provide energy to the British public through the 1980s, 90s and early 2000s.
"We sent the robot to the areas that posed the greatest value for improving our understanding of decommissioned offshore infrastructure."
Adrian added: "For seafloor imaging systems, data quality is affected by parameters beyond our control, like water quality, how rugged the terrain is.
"There are no guarantees that the data would be good enough for scientific analysis as there are many unknowns about the environment the data was gathered in."
To avoid this problem, the team at Southampton developed new ways to process the collected images on board the submersible and send data quality indicators over satellite, when the robot periodically surfaced while at the survey site.
The data revealed the distribution of different creatures that live out on the seafloor near these areas and provided an insight into some of their behaviours.
Professor Thornton added: "We could see individual, fish, sea stars, marine life. We can discover what kind of ecology lives out in these environments using our technology."
Collaborating technologies
The AT-SEA project team will now fully examine all the data obtained and compare it to that gathered using standard survey ship methods, to see whether it could be a suitable replacement.
Professor Thornton said: "It's very important for these kinds of systems to be accessible to a wider research community and support the research scientists want to conduct, and the statutory requirements for continued monitoring of decommissioned offshore infrastructure.
"By working with teams of experts from NOC, Southampton Marine and Maritime Institute (SMMI) and the In Situ and Remote Intelligent Sensing (IRIS) FEPS Centre, we can be much more efficient in the way we conduct research."





