A research group may have unraveled the mystery behind the locomotion of the ancient marine reptile, the plesiosaur, by recreating a bio-inspired control system that accounts for motion adjustment.
Extinct animals have vastly different body shapes from animals still around today, making it difficult to determine how they moved by comparing them to living species. Additionally, fossils rarely preserve the soft limb tissues that scientists need to study locomotion and gain key insights into their lifestyles.
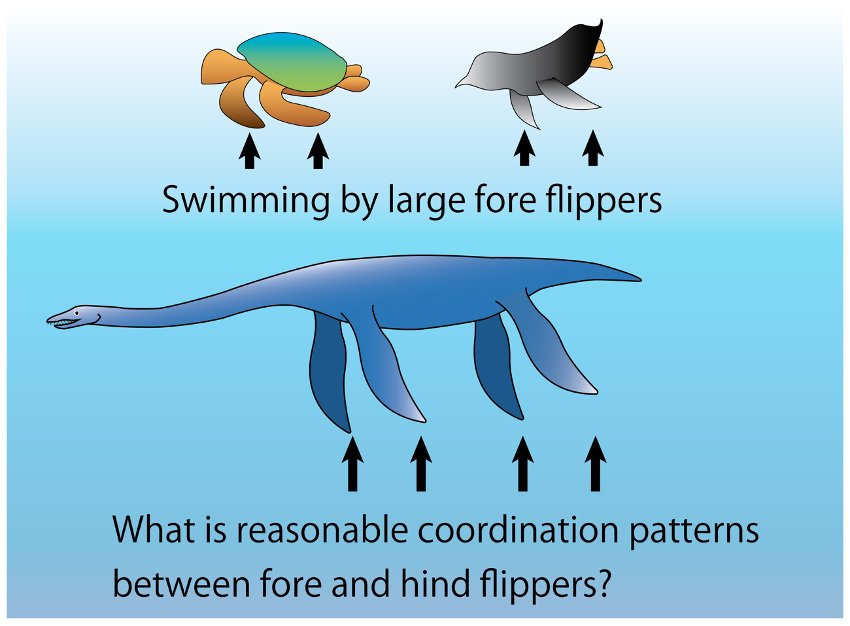
Plesiosaurs roamed Earth's prehistoric oceans, propelled by their unique body structure, which featured four large, equally sized flippers. Yet how plesiosaurs used these flippers to swim has long baffled paleontologists. This so-called 'four-wing problem' has been a topic of heated debate for years.
But now, a research group comprising researchers from Tohoku University, Kanagawa University, and the University of Manchester has developed a novel approach to tackle this mystery.
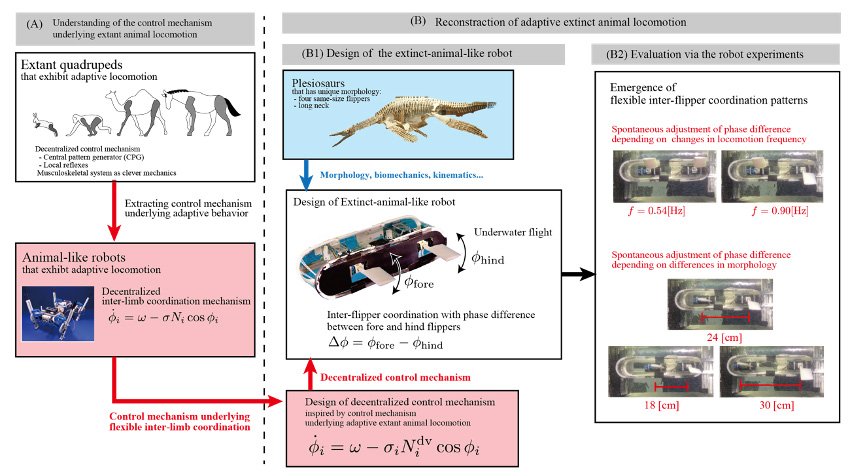
"Instead of focusing solely on how water interacts with plesiosaur bodies - that is, the hydrodynamics of swimming - we decided to examine how these animals controlled their movement," says Akio Ishiguro, a professor at the Research Institute of Electrical Communication (RIEC) at Tohoku University. "This is because plesiosaurs must have been able to swim at different speeds and in varied conditions."
Akio and his colleagues drew inspiration from inter-limb coordination mechanics underlying the flexible gait patterns used by other four-legged vertebrates, such as dogs and cats. They developed an autonomous decentralized control system for a plesiosaur-like robot.
Experimental results showed that the control system successfully generated coordinated patterns between the fore and hind flippers in response to changes in the flapping cycle and morphology.
"Our new approach reconstructs the way extinct animals can adjust their movement patterns in a flexible, situation-dependent manner," says Akira Fukuhara, an assistant professor at RIEC and the lead/first author of the paper. "It also means we can start investigating the complete locomotion repertoires of other extinct animals and learn more about their lifestyles."
Details of the finding were published in the journal Scientific Reports on October 28, 2024.
Also involved in the study were Mtsutoshi Sato and Hisayuki Ogawa, two former graduate students from RIEC; along with Tamaki Sato, a professor at Kanagawa University; and William Sellers, a professor at the University of Manchester.
Looking ahead, the research group hopes to make motion reconstructions that factor in other aspects of plesiosaur bodies. "Plesiosaurs notoriously possessed elongated necks, but these lengths varied considerably from creature to creature," adds Ishiguro. "We hope to create models that incorporate the roles of the neck, head, and torso in controlling these ancient creatures' movements."
- Publication Details:
Title: Rethinking the four-wing problem in plesiosaur swimming using bio-inspired decentralized control
Authors: Akira Fukuhara, Mitsutoshi Sato, Hisayuki Ogawa, Tamaki Sato, William Sellers, Akio Ishiguro
Journal: Scientific Reports





