Origami, the ancient art of paper folding, is taking a futuristic turn with the work of Cynthia Sung at the University of Pennsylvania. Supported by the U.S. National Science Foundation Faculty Early Career Development Program award, "Computational Design for Robust Legged Robots," Sung's research blends the precision of engineering with the creativity of art to develop origami-inspired robots. These robots, built from thin, foldable materials, offer a fascinating glimpse into the future of robotics.
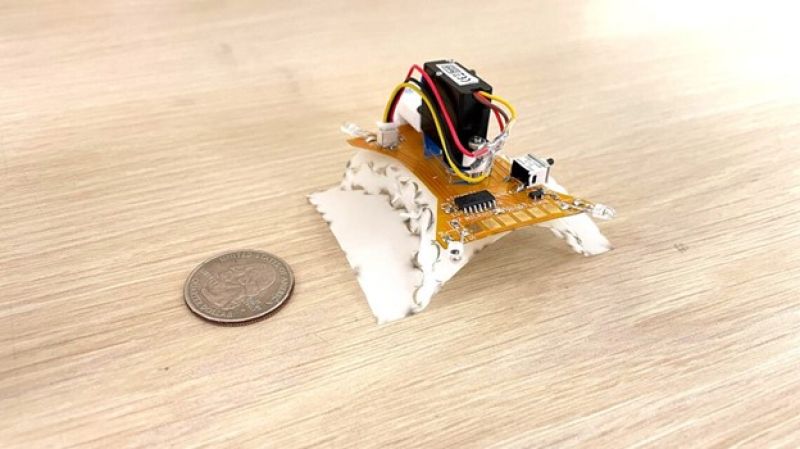
Origami-inspired fabrication and folding approaches can create robots that can transform their shape. For example, the CurveQuad robot recently developed by Sung's lab is an origami-inspired robot that can fold, unfold, crawl and steer using one motor. Its design is based on curved-crease origami, providing the robot with remarkable agility despite its simplicity - it only has four folds. These robots can directly incorporate electronics, actuation and sensing into their flat body. Such robots could be deployed in swarms for exploration or inspection tasks, showcasing the scalability and cost-effectiveness of this technology.
One of the exciting recent results from Sung's work is the principle that any kinematic chain - a term used to refer to a series of links and joints that make up a robot's arms and legs - can be constructed using origami techniques. Since origami fabrication is relatively fast and accessible, this means that in the future, full robots might be able to be designed and created within days or even hours, opening new possibilities for creating lightweight, flexible and safe robots, ideal for interacting with humans. The origami patterns are generated automatically, so a person does not need to be an origami artist or engineer; they only need to be able to describe the different joints of the robot that they want, and a design will come out. The potential applications are vast, from educational tools that make complex robotics concepts accessible for students to dynamic robots for exploring unstructured environments.
Supported by an NSF Engineering Design and System Engineering award, Sung and her team are expanding this work to incorporate actuators, sensors and control. They are also building intuitive design tools on top of the underlying algorithms to make the design process easier for non-roboticists. By clicking and dragging robot parts on a computer screen, designers can creatively explore different kinematic chains and directly convert them into an origami pattern they can test in real life. Using this software, the team collaborates with The Arts League to create robots, activities and workshops for the students, artists and the general community to learn more about robotics.

Origami robots are not just restricted to indoor environments and classroom activities. Another intriguing project supported by an NSF Dynamics, Control and Systems Diagnostics award involves underwater robots with origami-inspired designs that can change body shape to take in and expel water, creating a jet to propel itself forward, much like squids do. These robots offer unique opportunities because they are affordable, easy to make and sturdy, ideal for moving efficiently underwater.
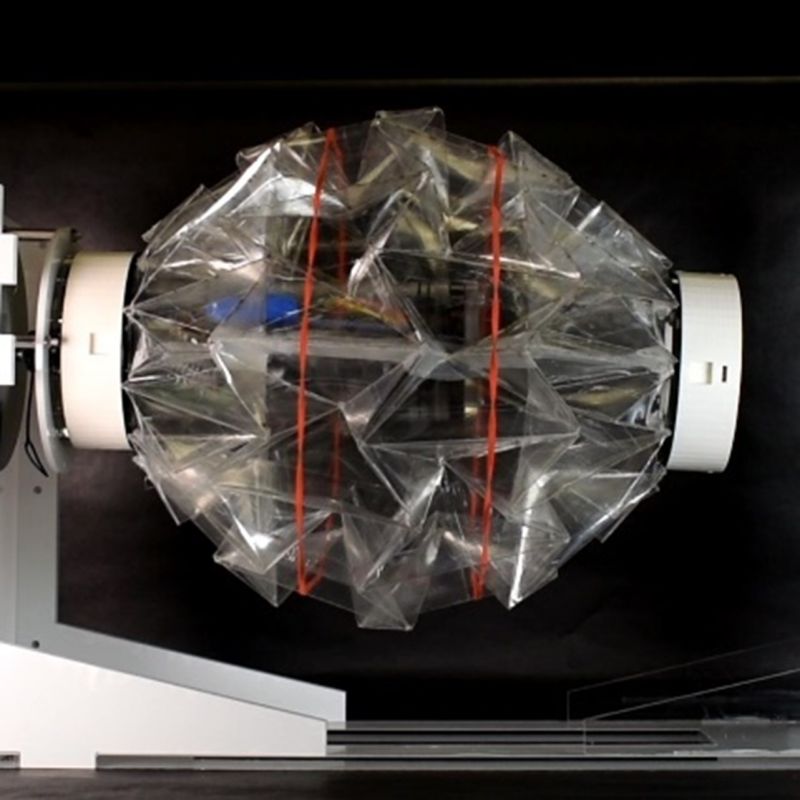
"We used the magic ball origami pattern, which can change between an ellipsoidal (low volume) and spherical (high volume) shape. A special mechanism helps the robot contract to take in water, and the magic ball's natural mechanics help it return to its original shape, creating a propulsion system that allows them to swim efficiently. The potential applications include environmental monitoring and underwater exploration," Sung said.
Origami-inspired robots are bringing us incredible advancements, from self-folding and unfolding robots to those that can dissolve or change forms. Sung's work advances robotics and inspires new thinking about materials and design. These innovations open up a wide range of applications, such as exploring unpredictable terrains in outer space, where the flexibility and adaptability of origami robots can be critical. The journey from simple paper folds to complex robotic systems exemplifies the power of foundational research, a key driver of NSF's mission.





