The legacy of microscale robotics at Cornell continues to unfold - and refold and unfold itself again.
The latest addition is a robot less than 1 millimeter in size that is printed as a 2D hexagonal "metasheet" but, with a jolt of electricity, morphs into preprogrammed 3D shapes and crawls.
The robot's versatility is due to a novel design based on kirigami, a cousin of origami in which slices in the material (the Japanese word "kiru" means "to cut") enable it to fold, expand and locomote.
The team's paper, "Electronically Configurable Microscopic Metasheet Robots," published Sept. 11 in Nature Materials. The paper's co-lead authors are postdoctoral researchers Qingkun Liu and Wei Wang, Ph.D. '24.
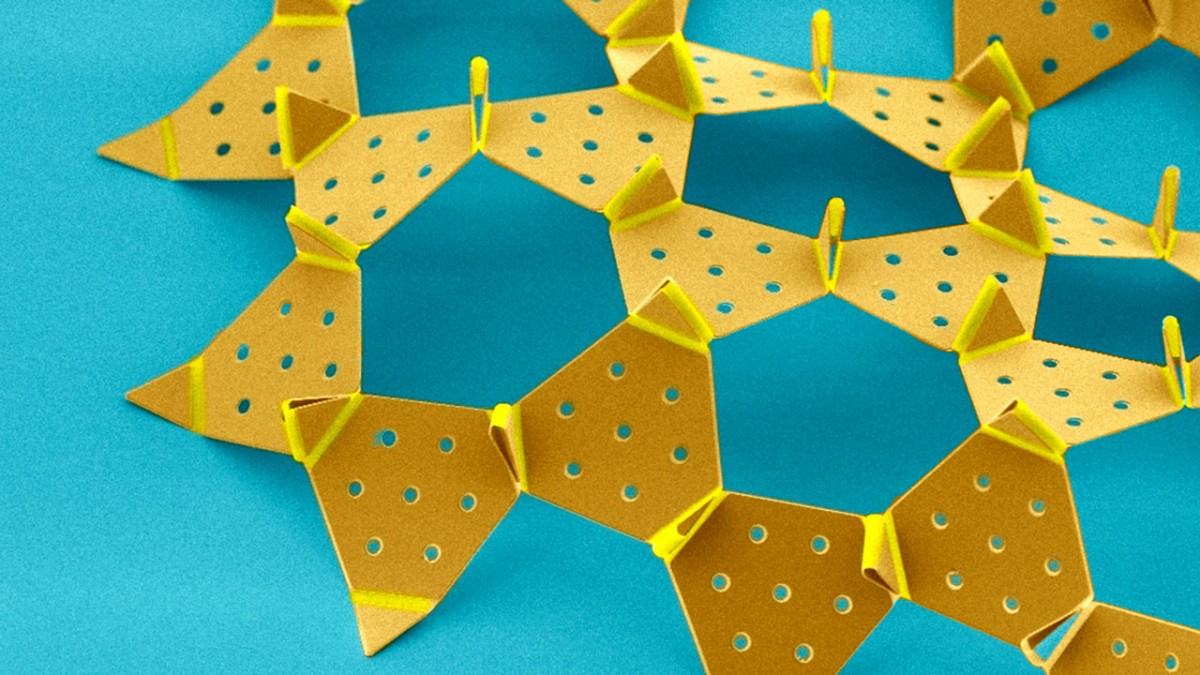
The kirigami robot is a hexagonal tiling composed of approximately 100 silicon dioxide panels that are connected through more than 200 actuating hinges.
The project was led by Itai Cohen, professor of physics in the College of Arts and Sciences (A&S), whose lab has previously produced microrobotic systems that can actuate their limbs, pump water via artificial cilia and walk autonomously.
The kirigami robot is the next step in that evolution, and is the result of longtime collaborations with Paul McEuen, the John A. Newman Professor of Physical Science (A&S); Hadas Kress-Gazit, the Geoffrey S.M. Hedrick Sr. Professor in Cornell Engineering; Nicholas Abbott, a Tisch University Professor in the Robert F. Smith School of Chemical and Biomolecular Engineering in Cornell Engineering; Alyssa Apsel, the IBM Professor of Engineering in Cornell Engineering; and David Muller, the Samuel B. Eckert Professor of Engineering in Cornell Engineering - all co-authors of the paper.
In a sense, the origins of the kirigami robot were inspired by "living organisms that can change their shape." Liu said. "But when people make a robot, once it's fabricated, it might be able to move some limbs but its overall shape is usually static. So we've made a metasheet robot. The 'meta' stands for metamaterial, meaning that they're composed of a lot of building blocks that work together to give the material its mechanical behaviors."
Such metamaterials can often be designed to have properties that are difficult to achieve with natural materials, Wang said.
The robot is a hexagonal tiling composed of approximately 100 silicon dioxide panels that are connected through more than 200 actuating hinges, each about 10 nanometers thin. When electrochemically activated via external wires, the hinges form mountain and valley folds and act to splay open and rotate the panels, allowing the robot to change its coverage area and locally expand and contract by up to 40%. Depending which hinges are activated, the robot can adopt various shapes and potentially wrap itself around other objects, and then unfold itself back into a flat sheet. Such is the craftiness of kirigami.
"In origami, if you wanted to create three-dimensional shapes, usually you have to hide the excess material inside the 3D object that you're making," Cohen said. "But with kirigami, you don't have to hide anything. Of course, it's not a contiguous sheet, so there are holes in it, but you don't have to lose any material. It's a much more efficient way of generating a three-dimensional shape."
Creating this kind of a machine at the microscale was a long, intricate process, from figuring out how to thread electrical wires through the various hinges to determining the ideal balance of floppiness and rigidity for the robot to make and hold its shape. Among the most significant challenges was devising a way for something with so many moving parts to move itself.
"When you have a kirigami sheet, you have hundreds of potential contact points with the ground. And so for the longest time, we were confused about which parts of the robot were contacting the ground to make the robot move," said postdoctoral researcher and co-author Jason Kim.

Researchers wrapped a millimeter-scale metasheet around a portion of the arm and body of the Statue of Liberty on a U.S. quarter. The metabot changed its shape to fit the contours of the statue.
Kim eventually realized that if, instead of using friction, they could make the robot swim through its environment by changing its shape, the forces became much more consistent. Of course, swimming at the microscale is very different than swimming in a pool. At that scale, it is more akin to swimming through a vat of honey.
"By changing the robot's shape so that different parts were closer to the ground at different points in the swimming gait, we could reliably use fluid drag forces to propel the sheet forward," Kim said.
That's one of the unique things about making microscopic robots, Cohen said. "The physics of locomotion at the microscale is often different from the physics of locomoting robots that are macroscopic."
Cohen's team is already thinking of the next phase of metasheet technology. They anticipate combining their flexible mechanical structures with electronic controllers to create ultra-responsive "elastronic" materials with properties that would never be possible in nature. Applications could range from reconfigurable micromachines to miniaturized biomedical devices and materials that can respond to impact at nearly the speed of light, rather than the speed of sound.
"Because the electronics on each individual building block can harvest energy from light, you can design a material to respond in programmed ways to various stimuli. When prodded, such materials, instead of deforming, could 'run' away, or push back with greater force than they experienced," Cohen said. "We think that these active metamaterials - these elastronic materials - could form the basis for a new type of intelligent matter governed by physical principles that transcend what is possible in the natural world."
Co-authors also include postdoctoral researcher Itay Griniasty; Michael Reynolds, M.S. '17, Ph.D. '21; Michael Cao '14; and doctoral students Himani Sinhmar, Jacob Pelster and Paragkumar Chaudhari.
This work was supported by the National Science Foundation's Emerging Frontiers in Research and Innovation program (EFRI); the Army Research Office; Cornell Center for Materials Research, which is supported by the NSF's MRSEC program; the Air Force Office of Scientific Research; and the Kavli Institute at Cornell for Nanoscale Science. The researchers made use of the Cornell NanoScale Facility, a member of the National Nanotechnology Coordinated Infrastructure, which is supported by the NSF, and the Cornell Institute of Biotechnology.





