5 min read
In a competition swimming pool, engineers tested prototypes for a futuristic mission concept: a swarm of underwater robots that could look for signs of life on ocean worlds.
When NASA's Europa Clipper reaches its destination in 2030, the spacecraft will prepare to aim an array of powerful science instruments toward Jupiter's moon Europa during 49 flybys, looking for signs that the ocean beneath the moon's icy crust could sustain life. While the spacecraft, which launched Oct. 14, carries the most advanced science hardware NASA has ever sent to the outer solar system, teams are already developing the next generation of robotic concepts that could plunge into the watery depths of Europa and other ocean worlds, taking the science even further.
This is where an ocean-exploration mission concept called SWIM comes in. Short for Sensing With Independent Micro-swimmers, the project envisions a swarm of dozens of self-propelled, cellphone-size swimming robots that, once delivered to a subsurface ocean by an ice-melting cryobot, would zoom off, looking for chemical and temperature signals that could indicate life.
"People might ask, why is NASA developing an underwater robot for space exploration? It's because there are places we want to go in the solar system to look for life, and we think life needs water. So we need robots that can explore those environments - autonomously, hundreds of millions of miles from home," said Ethan Schaler, principal investigator for SWIM at NASA's Jet Propulsion Laboratory in Southern California.
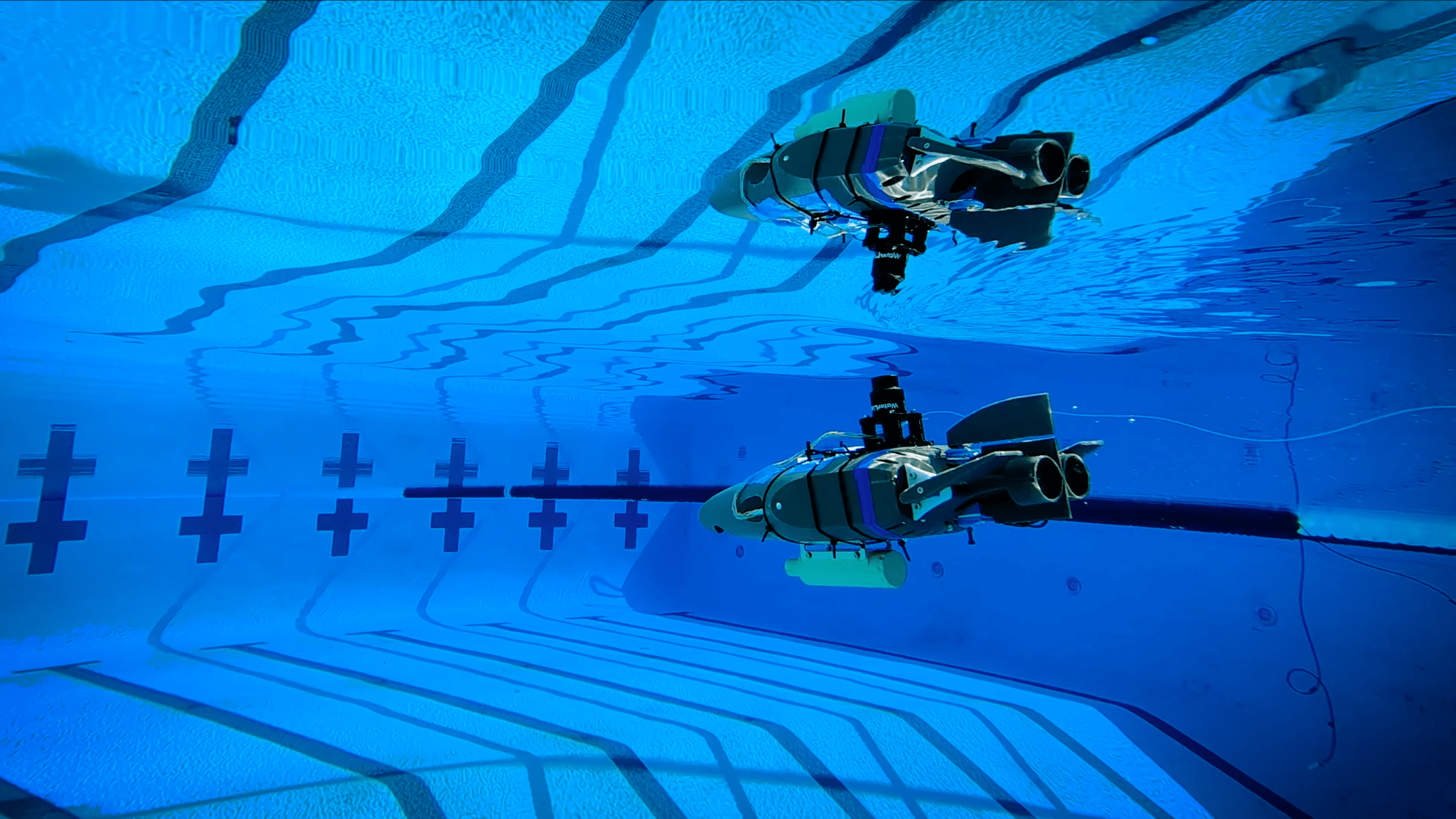
Under development at JPL, a series of prototypes for the SWIM concept recently braved the waters of a 25-yard (23-meter) competition swimming pool at Caltech in Pasadena for testing. The results were encouraging.
SWIM Practice
The SWIM team's latest iteration is a 3D-printed plastic prototype that relies on low-cost, commercially made motors and electronics. Pushed along by two propellers, with four flaps for steering, the prototype demonstrated controlled maneuvering, the ability to stay on and correct its course, and a back-and-forth "lawnmower" exploration pattern. It managed all of this autonomously, without the team's direct intervention. The robot even spelled out "J-P-L."
Just in case the robot needed rescuing, it was attached to a fishing line, and an engineer toting a fishing rod trotted alongside the pool during each test. Nearby, a colleague reviewed the robot's actions and sensor data on a laptop. The team completed more than 20 rounds of testing various prototypes at the pool and in a pair of tanks at JPL.

"It's awesome to build a robot from scratch and see it successfully operate in a relevant environment," Schaler said. "Underwater robots in general are very hard, and this is just the first in a series of designs we'd have to work through to prepare for a trip to an ocean world. But it's proof that we can build these robots with the necessary capabilities and begin to understand what challenges they would face on a subsurface mission."
Swarm Science
The wedge-shaped prototype used in most of the pool tests was about 16.5 inches (42 centimeters) long, weighing 5 pounds (2.3 kilograms). As conceived for spaceflight, the robots would have dimensions about three times smaller - tiny compared to existing remotely operated and autonomous underwater scientific vehicles. The palm-size swimmers would feature miniaturized, purpose-built parts and employ a novel wireless underwater acoustic communication system for transmitting data and triangulating their positions.
Digital versions of these little robots got their own test, not in a pool but in a computer simulation. In an environment with the same pressure and gravity they would likely encounter on Europa, a virtual swarm of 5-inch-long (12-centimeter-long) robots repeatedly went looking for potential signs of life. The computer simulations helped determine the limits of the robots' abilities to collect science data in an unknown environment, and they led to the development of algorithms that would enable the swarm to explore more efficiently.
The simulations also helped the team better understand how to maximize science return while accounting for tradeoffs between battery life (up to two hours), the volume of water the swimmers could explore (about 3 million cubic feet, or 86,000 cubic meters), and the number of robots in a single swarm (a dozen, sent in four to five waves).
In addition, a team of collaborators at Georgia Tech in Atlanta fabricated and tested an ocean composition sensor that would enable each robot to simultaneously measure temperature, pressure, acidity or alkalinity, conductivity, and chemical makeup. Just a few millimeters square, the chip is the first to combine all those sensors in one tiny package.
Of course, such an advanced concept would require several more years of work, among other things, to be ready for a possible future flight mission to an icy moon. In the meantime, Schaler imagines SWIM robots potentially being further developed to do science work right here at home: supporting oceanographic research or taking critical measurements underneath polar ice.
More About SWIM
Caltech manages JPL for NASA. JPL's SWIM project was supported by Phase I and II funding from NASA's Innovative Advanced Concepts (NIAC) program under the agency's Space Technology Mission Directorate. The program nurtures visionary ideas for space exploration and aerospace by funding early-stage studies to evaluate technologies that could transform future NASA missions. Researchers across U.S. government, industry, and academia can submit proposals.





