Abstract
A research team, led by Professor Hoon Eui Jeong from the Department of Mechanical Engineering at UNIST has introduced an innovative magnetic composite artificial muscle, showcasing an impressive ability to withstand loads comparable to those of automobiles. This groundbreaking material achieves a stiffness enhancement of over 2,700 times compared to conventional systems.
Soft artificial muscles, which emulate the fluidity of human muscular motion, have emerged as vital technologies in various fields, including robotics, wearable devices, and biomedical applications. Their inherent flexibility allows for smoother operations; however, traditional materials typically exhibit limitations in rigidity, hindering their ability to lift substantial weights and maintain precise control due to unwanted vibrations.
To overcome these challenges, researchers have employed variable rigid materials that can transition between hard and soft states. Yet, the available range for stiffness modulation has remained constrained, along with inadequate mechanical performance.
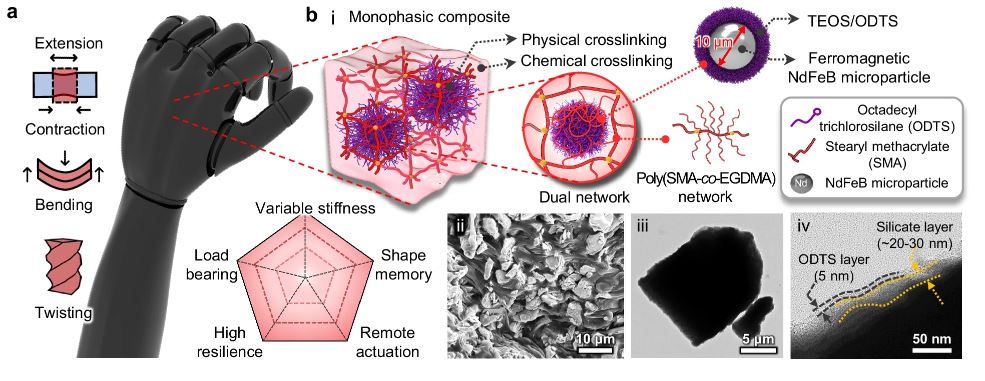
Figure 1. A schematic illustration depicting the concept of the monophasic composite muscle and its multifunctionalities.
Their innovative approach combines ferromagnetic particles with shape memory polymers to create a soft magnetic composite artificial muscle that significantly enhances both load-bearing capacity and elasticity. This new material integrates ferromagnetic particles capable of generating substantial magnetic forces with shape memory polymers recognized as versatile rigid materials.
Through specialized surface treatment, the ferromagnetic particles form intricate physical entanglements with the shape memory polymer. This synergistic interaction not only augments the mechanical properties of the composite but also facilitates rapid and efficient responses to external magnetic fields.
The artificial muscles developed through this advancement exhibit extraordinary adaptability, modifying their stiffness by up to 2,700 times and achieving more than eightfold increases in softness. Under rigid conditions, they are engineered to support tensile stresses of up to 1,000 times their weight and compressive stresses of up to 3,690 times their weight.
In terms of actuation efficiency, these innovative muscles demonstrate remarkable performance capabilities, with energy efficiency reaching an impressive 90.9%.
The research team has also implemented a double-layer architecture, incorporating a hydrogel layer designed to mitigate extraneous vibrations. This structure enables precise control over the soft artificial muscles, even during rapid operations.
Professor Jeong expressed optimism regarding the implications of these findings, stating, "This research opens avenues for transformative applications across diverse sectors, driven by mechanical properties and performance that transcend the limitations of existing artificial muscles," He adds, "Utilizing multi-stimulation methods, including laser heating and magnetic field control, we can remotely execute fundamental movements such as elongation, contraction, bending, and torsion, along with more complex actions like manipulating objects with precision."
This study, funded by the mid-sized research program supported by the Ministry of Science and ICT and the National Research Foundation of Korea (NRF), was published in the online version of Nature Communications, September 10, 2024.
Journal Reference
Minho Seong, Kahyun Sun, Somi Kim, et al., "Multifunctional Magnetic Muscles for Soft Robotics," Nat. Commun., (2024).





