- Curiosity Home
- Science
- News and Features
- Multimedia
- Mars Missions
- The Solar System
3 min read

Earth planning date: Wednesday, Sept. 18, 2024
The lengthy drive planned on Monday executed as expected, and we came in today to find our rover parked at a jaunty angle on a sloped ridge. There were some worries that the slope might limit our ability to use the arm for contact science in this plan (we don't want to do anything that might cause the rover to slide down the slope!), but after some careful consideration, we received the good news that all six of our wheels are holding on firmly to the ground, so there was no risk of slipping.
On Monday, two different options for today's plan were laid out. The first option, a "full contact science" plan where we don't drive, was to be executed if Monday's drive put us exactly where we hoped. The second, a "touch-and-go" plan where we do some light contact science before driving away, was to be executed if the drive didn't put us where we wanted to be. As it happened, the rover was a little too enthusiastic about driving, and actually put our desired workspace under its body rather than in front where the arm could reach it. There's always a little uncertainty in the final position after such a long drive! So, we decided to stick with a touch-and-go plan that includes a tiny backwards drive of less than a metre to reposition our desired target in front of the rover.
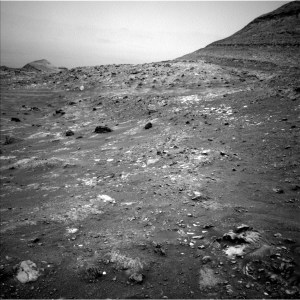
Although we need to re-position, we aren't slowing down on science for even a second. We are parked in front of a large fractured slab of bedrock, which can be seen in the above image. This slab became the contact science target for this plan with DRT and APXS activities on "The Minster." Mastcam is getting a workout today as well, with large mosaics of "North Channel," "Buckeye Ridge," "Quinn," and "Island Pass." These mosaics are all documenting various aspects of the ridge we're sat on and the edge of the Gediz Vallis Channel, including sedimentary rocks, white sulphate materials, and gravels and fine-grained materials. ChemCam is also taking a turn on the bedrock slab with a LIBS activity on "Grand Sentinel" and a mosaic of some exposed white stones off in the distance.
The second sol of the plan, after our short drive, is largely taken over by environmental science activities, though there is our usual post-drive ChemCam AEGIS. These activities include a Mastcam tau and Navcam line-of-sight to measure the amount of dust in the atmosphere around and above us, as well as a dust devil movie, suprahorizon cloud movie, and some Navcam deck monitoring to see if our driving or the wind is moving around any of the sand and dust on the rover deck. The team is also taking the usual set of REMS, RAD, and DAN observations.
Written by Conor Hayes, Graduate Student at York University