Members of the Aqua Lab from the Society for the Study of Robotics — an official Tokyo Tech student club — have won the Best Performance Award at the International Federation of Automatic Control (IFAC) Marine Robots Night Festival, held at Nippon Maru Memorial Park in Yokohama City on July 12.
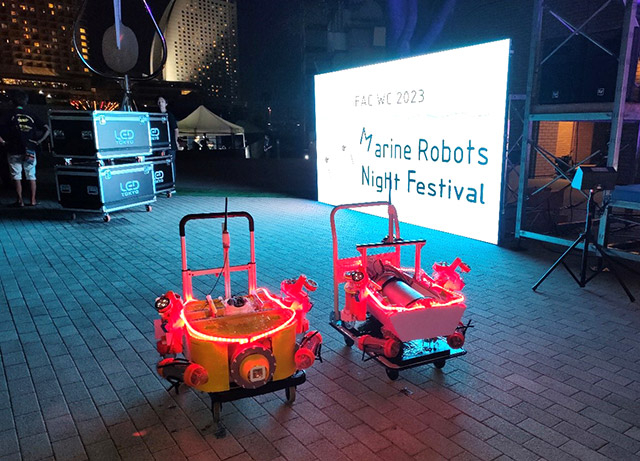
Kurione2 (left) and Kurione3, two of Aqua Lab's robots
The Marine Robots Night Festival was held as part of IFAC World Congress 2023, a public forum which took place at the Pacifico Yokohama convention complex from July 9 to 14. It was the first time the congress came to Japan in over 40 years. The event aimed to promote marine robotics and control technology, and featured exhibits from marine technology-related companies and organizations and an open marine robot performance contest.
Typically, marine robot events focus on technical abilities of the robots such dive depth, capability to withstand waves, and ease of maneuverability and maintenance. This time, however, the contest focused on how well the robots could entertain people unfamiliar with underwater technology for 10 minutes.
The members of the Society for the Study of Robotics did not disappoint. They combined performances with music and technical commentary using two of their underwater robots - Kurione2, which competed in the 8th Underwater Robotics Competition in Okinawa in November 2022, and Kurione3, a newly developed robot based on Kurione2.
Since the event was held in the evening, each team's robot was fitted with LED lights and other decorations. Tokyo Tech members applied a multi-colored LED tape across their robots, aiming for a spectacular performance during which the colors were controlled in time with the music. To make the performance even more exciting, the team attempted to add to their robot a new water fountain function, which was the toughest challenge technically.
The Tokyo Tech team designed a centrifugal pump based on fluid dynamics to produce a 3-meter-high fountain using a mechanism in which a motor spins an impeller to project a jet of water. Since the motor can malfunction if it comes into contact with seawater, it was necessary to devise a way to transmit power between the motor and the propeller in the sea while preventing contact with seawater. There are various ways to do this, but to minimize the risk of seawater leakage, Aqua Lab members used a mechanism called magnet coupling, in which magnets are attached to the rotating shafts of both the motor and propeller, and the rotational power is transmitted by the magnetic force of both. This force is transmitted even if an object such as an acrylic plate is inserted between the magnets, so the motor can be completely shielded from seawater (Figure 1).
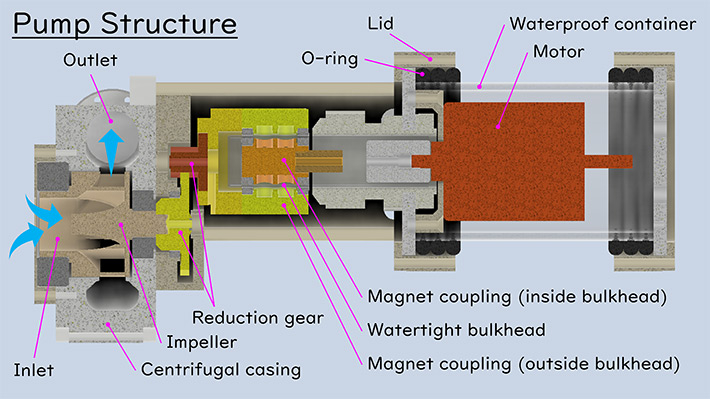
Figure 1. Water fountain mechanism used in Kurione robots
While the principle of the concept was fairly simple, the team struggled with loss. Since the rotation of the motor was transmitted by magnetic force, the greater the distance between the magnets, the smaller the magnetic force, and therefore, the smaller the force to raise the water jet. It was therefore necessary to design the motor, the container that protects the motor from seawater, and the magnets on the propeller side to be as close as possible. However, this proximity meant that the magnets came into contact with the container due to machining accuracy and vibration caused by rotation, resulting in loss due to frictional force. The Tokyo Tech team also found that the amount of loss varied greatly depending on how the entering seawater was handled.
When loss occurred, it weakened the force of the water jetting out of the fountain. It also caused a large electric current to flow through the motor, which could damage the circuit. Therefore, the Tokyo Tech team realized a fountain mechanism with as little loss as possible through numerous trials and errors in the mounting method of the rotating shaft and the positioning of the fountain.
Lack of opportunities to practice the performance was also a major challenge. In addition to learning to operate the robots to match their movements to the music used, it was also important for the operators to coordinate with each other to move two robots simultaneously in the dark sea.
The sea kayak park in which the performance took place was larger than a 25-meter pool, which is often the size of the venue for marine robot events. There were no opportunities to practice in a place of comparable size. Therefore, the team created a simulator that reproduces the robot's movements in a virtual environment (Figure 2). Since maneuvering could be practiced without being in the actual physical environment, it was possible to carefully correct the robots' performances and match the timing of their maneuvers.
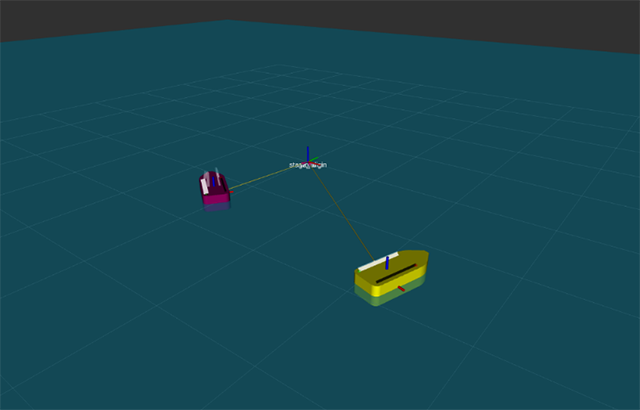
Figure 2. Created performance simulator with yellow and red objects representing robots
Maneuvering practice using performance simulator
The actual performance was conducted in front of an audience of several hundred people. Although the team experienced some connection problems just after the start of the performance, they were able to finish their show successfully. The fountain feature was particularly well received, and the audience cheered as the Kurione robots jetted out water.

Kurione2 and Kurione3 during performance (Photo courtesy of Kentaro Umemura)
Comments from recipients of Best Performance Award
Yo Toyomoto
4th year, Systems and Control Engineering
I led the direction and production of the simulation. In response to the challenge of entertaining the audience for 10 minutes with a robot in the lead role, there were not many examples of such performances in the past, so there were plenty of things to consider, including necessary equipment. We built a simulation environment based on my experience in theater during middle and high school, as we felt the need to not only think about the performance but also to practice it. Throughout this project, we applied the "If something does not exist, we will make it" spirit of the Society for the Study of Robotics.
On the day of the competition, when the audience cheered, I was filled with happiness and gratitude towards my fellow students, who continued to build the robots without giving up until just before the final performance. Perhaps we have taken a step forward in the new fusion of marine robotics and artistic performance.
Keisuke Uchikawa
1st-year master's student, Computer Science
I was in charge of robot control in the team, and as a student club, this was the first time we took on the challenge of simultaneously controlling two robots. It was tough, but thanks to everyone's cooperation, we succeeded.
Underwater robotics is generally a minor field and has had limited exposure to the public. However, this time, as the event was held in conjunction with IFAC World Congress 2023, we were able to showcase our achievements to an audience of several hundred people, including many international visitors. We were very happy and deeply moved that so many people were able to see our robots. I would like to use this platform to express my deepest gratitude to everyone involved for giving us this opportunity.

Yo Toyomoto (front row, left), Keisuke Uchikawa (front row, 2nd from left), and other members of Society for the Study of Robotics after receiving award

Certificate of Best Performance Award





